AUTOR: Jorge Armando Bonilla
FUENTE: AGENCIA INFORMATIVA CONACYT
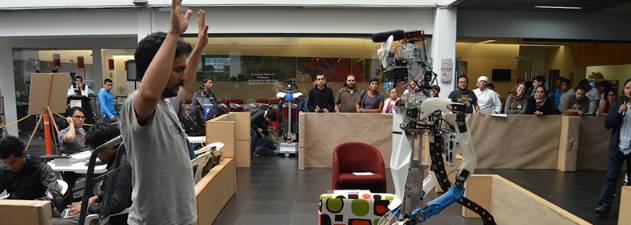
Ciudad de México.(Agencia Informativa Conacyt).- A tan solo unos días de que se lleve a cabo el campeonato mundial de robótica “RoboCup 2016 Leipzig”, a celebrarse entre el 30 de junio y 4 de julio en Alemania; Universum, Museo de las Ciencias albergó a tres de los equipos mexicanos participantes, quienes realizaron una serie de prácticas y demostraciones.
Entre el 30 de mayo y el 3 de junio, integrantes de los equipos del Instituto de Investigaciones en Matemáticas Aplicadas y en Sistemas (IIMAS) y de la Facultad de Ingeniería (FI), ambos de la Universidad Nacional Autónoma de México (UNAM), así como el equipo del Instituto Nacional de Astrofísica, Óptica y Electrónica (INAOE) —perteneciente al Sistema de Centros Públicos de Investigación del Consejo Nacional de Ciencia y Tecnología (Conacyt)—, realizan las exhibiciones en el vestíbulo del recinto.
Los equipos mexicanos que participan en la actividad con sus robots Golem-III, Justina y Sabina, respectivamente, fueron seleccionados para competir en la categoría robot de servicio (@Home), donde sus desarrollos deberán superar diversas pruebas que van desde desplazarse (navegar) de manera autónoma en una casa y sortear obstáculos, hasta reconocer personas y seguirlas.
Sobre Justina y Sabina
 En entrevista con la Agencia Informativa Conacyt, Jesús Savage Carmona, profesor de ingeniería de la UNAM e integrante del equipo encargado del desarrollo del robot Justina, dijo que se trata de un robot con tres componentes principales: el mecánico (base, torso y cabeza mecatrónica), el electrónico (cuatro motores en la base, dos motores en los brazos y el de la cabeza) y la parte del software (que controla el robot).
En entrevista con la Agencia Informativa Conacyt, Jesús Savage Carmona, profesor de ingeniería de la UNAM e integrante del equipo encargado del desarrollo del robot Justina, dijo que se trata de un robot con tres componentes principales: el mecánico (base, torso y cabeza mecatrónica), el electrónico (cuatro motores en la base, dos motores en los brazos y el de la cabeza) y la parte del software (que controla el robot).
Asimismo, consta de varios sensores que le permiten controlar el medio ambiente, tales como cámaras, un detector de proximidad y un sensor láser, además de bocinas para reproducir su voz y una cámara térmica que permite detectar a las personas.
También en charla exclusiva con la Agencia Informativa Conacyt, José Martínez Carranza, investigador de tiempo completo de la coordinación de ciencias computacionales del INAOE, dijo que Sabina es un robot de servicio basado en una plataforma de tipo diferencial (ruedas) y una estructura de torre donde se le pueden montar computadoras y sensores.

El objetivo de Sabina es convertirse en un robot de apoyo en la casa, que pueda acompañar y asistir a las personas en un día cotidiano. “Es decir, que pueda ir por una bebida y llevárnosla, asistir en las labores del hogar e incluso platicar con nosotros”, dijo.
¿Quiénes los desarrollaron?
Tanto Golem-III como Justina y Sabina son robots desarrollados por equipos multidisciplinarios integrados por profesores, investigadores, alumnos de licenciatura, maestría e incluso doctorado. “En el caso de Justina, participan en su desarrollo estudiantes de la Facultad de Ingeniería (computación, mecatrónica y electrónica); asimismo, estudiantes de la maestría y doctorado (ciencias de la ingeniería en computación e ingeniería eléctrica/procesamiento de señales)”, dijo Savage Carmona.
A su vez, José Martínez Carranza señaló que en la construcción del robot del INAOE trabaja un equipo conformado por investigadores, estudiantes de maestría, doctorado y posdoctorales. “Los investigadores son el doctor Enrique Sucar, quien coordina el proyecto, Eduardo Morales y yo; también nos apoya Luis Valentín Coronado, David Carrillo López y Juan Carlos González Islas”.
Para calificar al mundial de robots es necesario enviar un video y un artículo científico que describa su funcionamiento.
Un jurado evalúa el material y designa a los competidores.