Puebla, Puebla. (Agencia Informativa Conacyt).- Ante la necesidad de vincular a los estudiantes de ingenierías en mecatrónica, industrial, de sistemas y mecánica de la Universidad del Valle de Puebla (UVP) con proyectos prácticos sustentados en la innovación, los profesores José Rodrigo Cuautle Parodi, Eduardo Berra Villaseñor y Mónica Pérez Castañeda diseñaron el método docente ABProt que ha permitido la creación de al menos siete prototipos tecnológicos desarrollados por los alumnos de esta institución.
ABProt (aprendizaje basado en prototipos) motiva habilidades de observación, cuestionamiento, identificación de problemáticas o necesidades, trabajo en equipo, desarrollo de la creatividad y pensamiento científico, aplicación de conocimiento especializado en el diseño de soluciones y, por supuesto, el aprendizaje directo.

El maestro y coordinador del área de investigación de la UVP, José Rodrigo Cuautle Parodi, detalló en entrevista que la implementación de esta metodología sustenta los pasos que permiten al estudiante concluir con éxito su prototipo.
“La memorización es un método obsoleto de aprendizaje, lo que necesitamos es el desarrollo de habilidades de pensamiento crítico e innovación y esta metodología permite ofrecer al estudiante, de manera muy clara, una coherencia en los pasos que tiene que seguir para identificar una necesidad de su entorno y darle solución a través de un prototipo tecnológico”, refirió el maestro Cuautle Parodi.
Un robot humanoide controlado
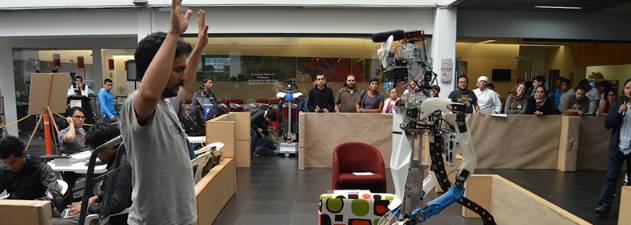
Con InMoov, robot humanoide de tamaño real con un diseño libre en Internet y desarrollado por el francés Gaël Langevin, los estudiantes junto con sus profesores implementaron funciones como el seguimiento de una fuente de sonido por medio de posturas con la cabeza, ejecución de una gama de comandos por voz, establecimiento de pláticas sencillas y la interacción con un robot móvil de arquitectura diferencial, al cual InMoov guía para que salga de un laberinto dado.
“Este robot se puede programar para tener diversas interacciones con las personas, siempre y cuando nosotros metamos los mecanismos de programación y de control y se unifique en un software que los chicos puedan desarrollar. Queremos incluir inteligencia artificial para que InMoov pueda obtener datos de Internet. Una vez que ya tengamos al robot funcionando, podemos diseñar un androide mexicano que ya tenga interacción”, detalló el maestro Eduardo Berra Villaseñor.
El trabajo con InMoov también abre otros campos de estudio para elaborar prototipos que permitan darle la totalidad en estructura, pues el diseño de Langevin solo es de la cintura hacia arriba.
“Ya se trabaja con el diseño de sus caderas y extremidades inferiores, que incluso pueden ser utilizadas como piezas ortopédicas o prótesis para personas que lo requieran”.
Asimismo, este robot humanoide ya es parte de la tesis de Giovanni Ortega Muñoz, egresado de ingeniería en mecatrónica, quien realizó la investigación a partir del desarrollo y control de la interfaz natural de InMoov.
Diseño de extremidades inferiores
Una pierna con fines ortopédicos impresa en 3D es otro de los prototipos desarrollados. Por su diseño, su producción es de bajo costo y admite la posibilidad de ser elaborada con fibra de carbono, además de que el modelo se apega a formas humanas más estéticas, a diferencia de las prótesis tipo bastón que hay en el mercado.
“Entre las ventajas, está el sistema de sustento en la rodilla, el de talón y la punta flexible que ayudaría a una persona a tener un mejor control con un microprocesador que lo auxiliaría con el balanceo de su propio peso, algo que una pierna comercial hoy en día no realiza, porque su funcionamiento es mecánico. Entonces con este autoequilibro nosotros podemos lograr que las personas tengan una mayor comodidad en la parte que resta de su articulación a fin de evitar el roce”, añadió el maestro Berra Villaseñor.
Las ideas no se agotan
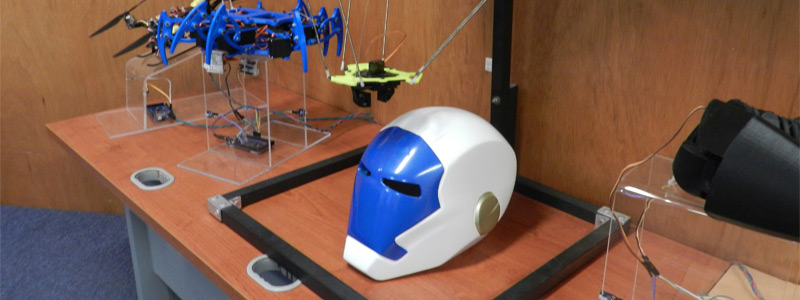
 El desarrollo de drones, la construcción de una araña robótica que trabaja la sincronía de piernas con tarjetería de control para múltiples motores, un brazo delta (desarrollado a partir de un modelo matemático que permite su movimiento), así como un pez robótico (creado para el monitoreo de sustancias contaminantes en medios acuosos), ha facilitado a los profesores de ingeniería la enseñanza de la aerodinámica, el control sofisticado de un dron, la creación de sistemas de inteligencia artificial y de dispositivos que mejoran las funciones de estos prototipos.
El desarrollo de drones, la construcción de una araña robótica que trabaja la sincronía de piernas con tarjetería de control para múltiples motores, un brazo delta (desarrollado a partir de un modelo matemático que permite su movimiento), así como un pez robótico (creado para el monitoreo de sustancias contaminantes en medios acuosos), ha facilitado a los profesores de ingeniería la enseñanza de la aerodinámica, el control sofisticado de un dron, la creación de sistemas de inteligencia artificial y de dispositivos que mejoran las funciones de estos prototipos.
“La creatividad no se queda ahí, también tratamos que los chicos puedan generar piezas de ensamble con acabados más profesionales a partir de materiales económicos. Por ejemplo, se diseña un modelo de un casco en 3D y se construyó a base de papel, como si fuera una piñata, solo que en el acabado directo simulamos materiales como el metal a base de polímeros y pintura automotriz. Estas capas son gruesas y permiten crear una estructura terminada de un humanoide”, concluye el maestro Eduardo Berra Villaseñor.
Por su parte, la maestra Mónica Pérez Castañeda advirtió que el ABProt ha mostrado resultados satisfactorios en el año que lleva implementado en un total de 150 estudiantes.
“Hemos detectado que con este modelo los alumnos se acercan con más entusiasmo a las matemáticas, a la programación y al diseño tecnológico cuando tienen que construir un prototipo. Los resultados han sido muy satisfactorios y eso nos impulsa para seguir estimulando a los estudiantes en innovación”, indicó.
AUTOR: Dalia Patiño González
FUENTE: AGENCIA INFORMATIVA CONACYT